北京大学谢广明团队提出一种可脱离机械臂工作的水下仿生多模态抓取手
发布时间:2024-09-13
近期,北京大学谢广明教授团队受章鱼丰富的行为库启发,开发了一种可以执行多模态抓取的软体抓取手,并且赋予了其水下全向爬行和游动的功能,验证了抓取手在水下环境中脱离机械臂工作的可行性,有助于进一步提高水下机器人的性能,拓宽其应用场景。相关研究以"Octopus-Inspired Underwater Soft Robotic Gripper with Crawling and Swimming Capabilities"为题,发表在Research上。
论文链接: https://doi.org/10.34133/research.0456
研究背景
水下固体污染物的清理、生物资源捕捞和水下考古等水下作业任务均为劳动密集型活动。但是,由于水下环境的复杂性和变化性,海洋的开发与利用面临着巨大的挑战。在水下环境中,由于光线、压力、温度等因素的影响,人类在水下的直接作业能力受到严重限制。此外,水下作业的性质也可能给潜水员带来一系列伤害风险。水下机器人可以替代人类长时间在水下环境中进行各种任务,如水底勘探、水下生物研究、水下环境监测与保护、水下资源开发等。但在执行诸如抓取水下不规则垃圾、易碎瓷器的水下考古作业、以及捕捞水下生物资源等任务时,这对水下机器人的抓取手的多模态自适应抓取能力提出了更高的要求。尽管已经开发出了一些用于水下环境的机器抓取手,但它们通常只能固定在机械臂上,使用范围受到机械臂活动范围的限制。这些抓取手无法触及或操作位于狭窄水下空间中的物体,例如珊瑚礁地层、岩石裂缝、沉船内部等。在非结构化水下环境中进行多类型物体抓取时,现有抓取手的能力显示出了局限性。
研究进展
章鱼擅长自适应抓取和水下运动,受章鱼手臂协同作用的启发,研究团队开发了一种带有六个手臂的软体抓取手。通过六个手臂的协作,使抓取手具有两种不同的状态:抓取状态和运动状态。当附着在机械臂上时,抓取手以多模态抓取模式运行;当与机械臂分离时,抓取手可以独立地进行水下运动和抓取。多条手臂的协同工作实现了三个关键功能的集成:抓取、全向爬行和三维游泳(如图1所示)。
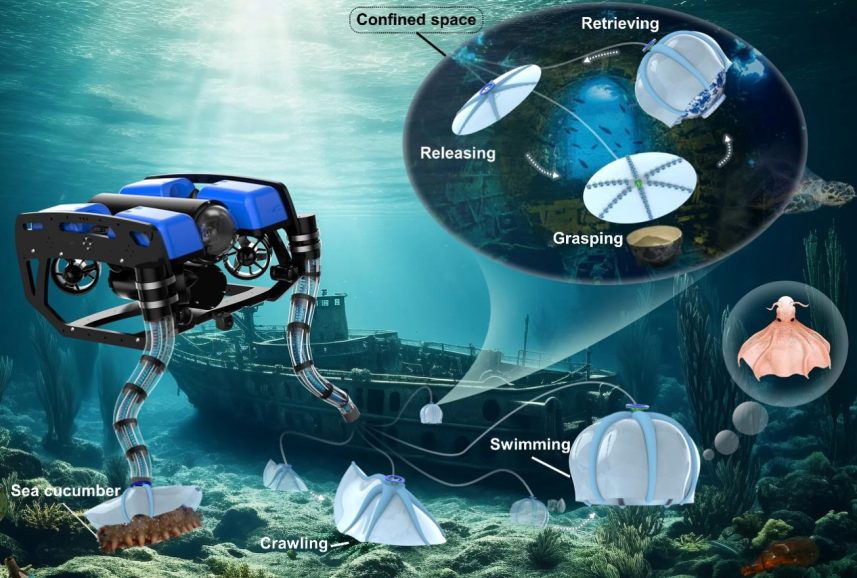
图1 受章鱼启发的水下软体抓取手系统的设计和任务概况
如图2所示,该软体抓取手由六个手臂、一个腹膜和三十个吸盘(位于手臂上)组成。夹具上有6个独立的手臂控制通道,分别控制手臂的运动。此外,还有6个串联贯通的吸盘控制通道,用于统一控制吸盘的正负压切换。常压下,吸盘将产生预吸附的吸力。对吸盘施加负压,吸盘增大内凹弧度以进一步激活吸盘,可以实现吸力增强进而实现吸力抓取。对吸盘施加正压,吸盘转换为凸出的形态,可以实现吸盘与物体的主动分离。
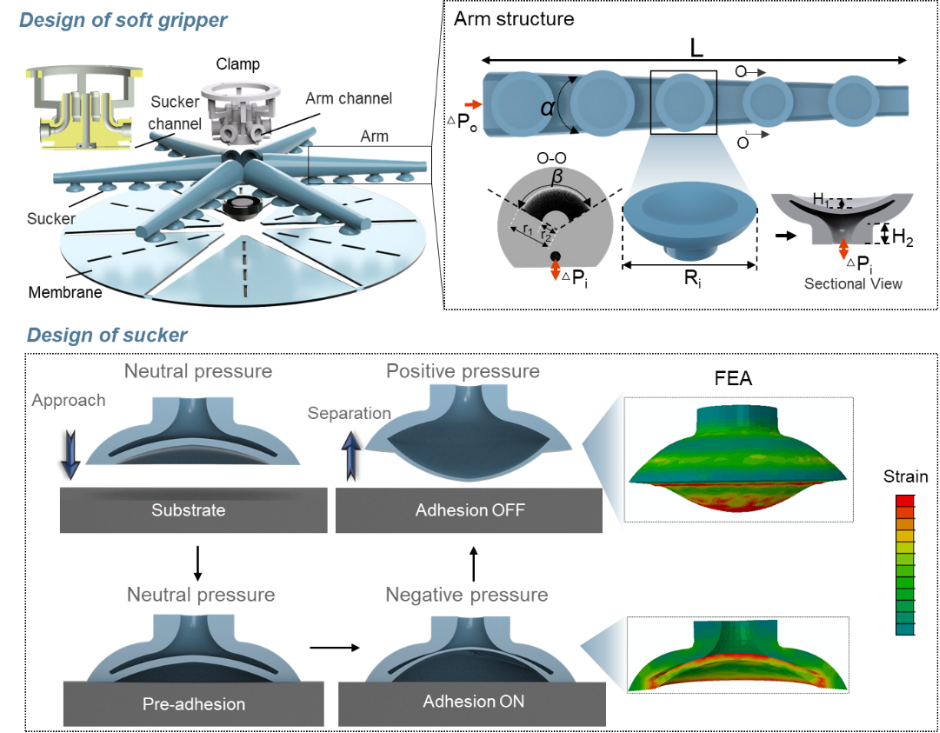
图2 软体抓取手的设计示意图
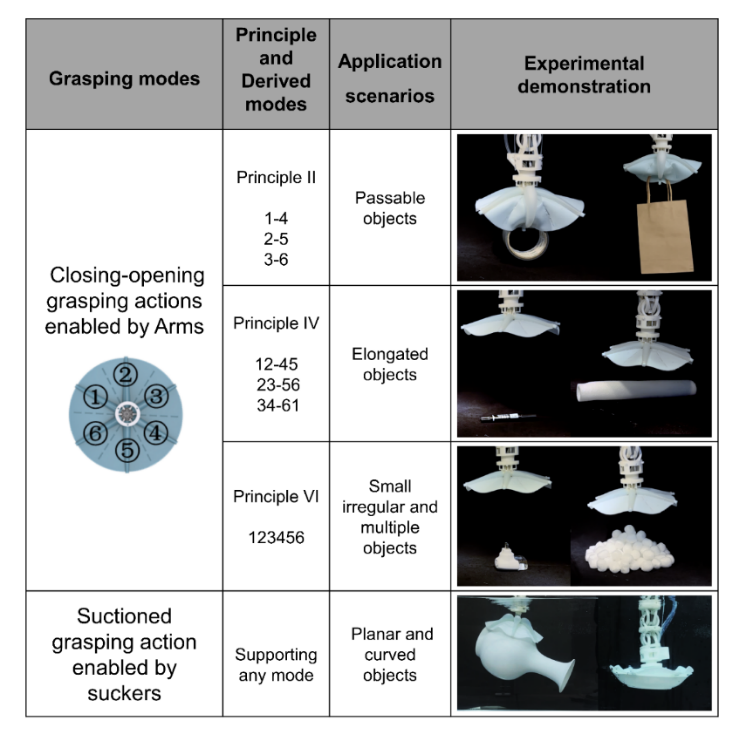
该软体抓取手软体有三种驱动原理(表1):驱动任意对称的两个手臂(II)、驱动任意对称的四个手臂(IV)和同时驱动六个手臂(VI)。驱动原理II可以利用对称的手臂穿过的被抓取物体的手柄来实现对物体的抓取。驱动原理IV可输出较大的抓取力,实现对各种细长物体的抓取。驱动原理Ⅵ可以实现对小于抓取手直径的物体的自适应抓取,并能同时以包裹方式抓取多个物体。吸力模式可以完成平面或者弧面物体的抓取,也可以为驱动原理II、IV、VI提供吸力支持。吸盘的吸附和释放能力使得抓取手可以从抓取状态轻松切换到释放状态。多种驱动原理的组合衍生出8种抓取模式以实现多种类型不规则物体夫的自适应抓取。视频1(参见https://mp.weixin.qq.com/s/KZiugqSeT2Vr7bRAZhuRLg)展示了各种类型的垃圾收集,和水产品的拾取,以及在水下处理瓷器。
表1 不同驱动原理下软体抓取手的的抓取模式和应用场景
为了探索抓取手的爬行性能,研究人员尝试了从单臂到六臂的所有可能的步态组合(图3A)。驱动一只手臂可以产生一种步态;驱动两条手臂可以产生三种步态;驱动三条手臂可以产生三种步态;驱动四条手臂可以产生三种步态;驱动五只手臂可以产生一种步态。抓取手爬行速度最快的步态是由中间有一个未驱动的臂间隔的任意两个相邻手臂驱动(图3B)。通过向手臂施加正压使其达到最大弯曲,随后关闭泵,利用手臂的恢复过程实现水下爬行(图3C)。由于抓取手设计的对称性,从而可以实现全向运动。图3D-F为抓取手的全向运动性能,具有强机动性(在水下爬行的软抓取器可以拖动管道),抓取手可以分别实现“□”、“△”、“8”路径的爬行(参见https://mp.weixin.qq.com/s/KZiugqSeT2Vr7bRAZhuRLg视频2)。除了在水下爬行,抓取手还可以垂直和三维游泳。
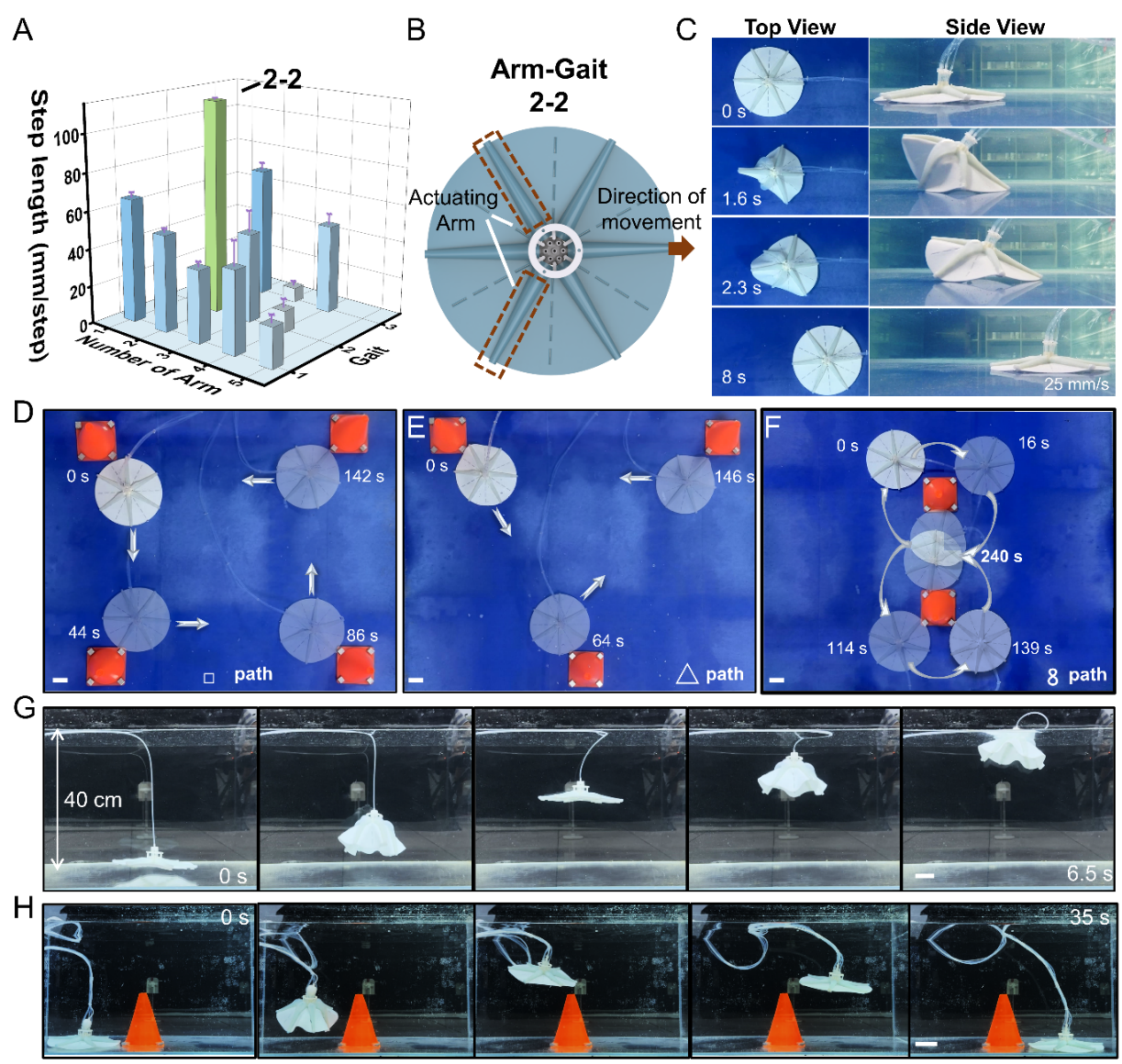
图3 抓取手的运动性能
由于该抓取手具备多样化的抓取方式和卓越的运动性能,研究人员证明了其在水下受限空间中应用的可行性。如图4A-B所示,对抓取手进行了在复杂环境中进行抓取的挑战。为此,研究人员在1.5米深的水池内构建了一个复杂的水下密闭空间。图4A展示了任务的详细步骤,而图4B则展示了实验设置的侧视图。机械臂由于空间限制无法直接进入水箱进行抓取,因为该密闭空间仅设有一个可通过手柄操作的入口。水箱的墙壁被定义为固定障碍物,内部还布置了可移动障碍物,进一步增加了环境的复杂度。抓取手需通过一个小洞进入并越过内部的可移动障碍物,以到达水箱内的目标物体。如图4C所示,通过控制软抓取手的运动,研究人员成功实现了对物体的接近和抓取(参见https://mp.weixin.qq.com/s/KZiugqSeT2Vr7bRAZhuRLg视频3)。这个复杂的抓取任务的步骤如下:首先,抓取手脱离机械臂以抓住手柄,拉动手柄打开入口。其次,启动垂直游动模式到合适的高度,并驱动三维游动模式穿过孔洞。然后,启动三维游泳模式越过水箱内的障碍物。随后,抓取手转换为爬行模式,接近物体并在其上方游动。最终,调整抓取手至物体上方的准确位置,执行抓取动作,并通过管道回手,完成物体的抓取。
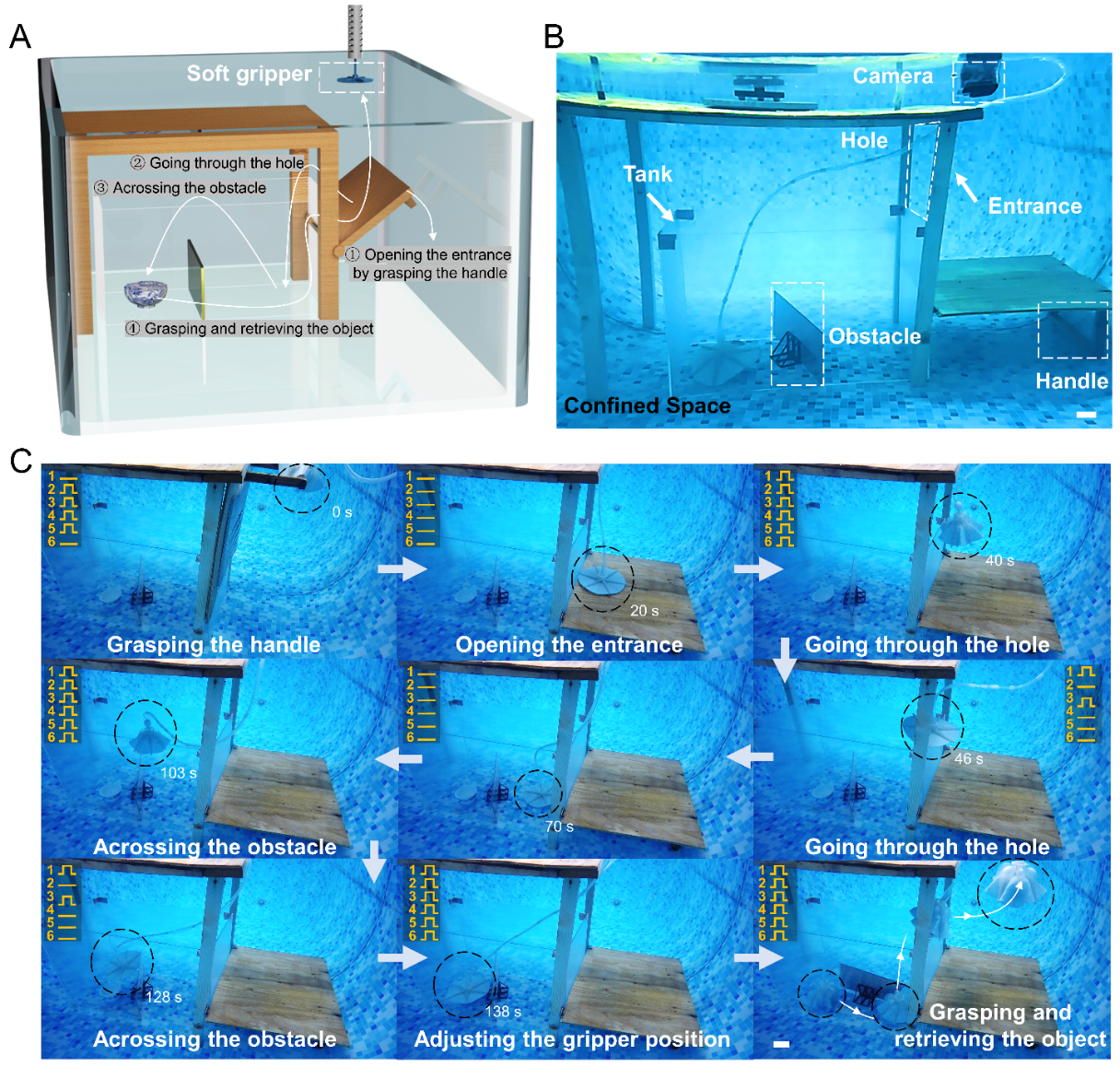
图4 抓取手在受限空间中的运动及抓取
未来展望
受章鱼启发,论文提出了一种仿生抓取手,该抓取手展示出了出色的多模态抓取能力及运动能力。相比于现有抓取手,其抓取能力和运动能力的集成可以摆脱机械臂的限制,完成传统机械臂和抓取手难以执行的机动操作,验证了抓取手在水下环境中脱离机械臂工作的可行性。该工作有助于进一步提高水下机器人的性能,拓宽其操作空间和应用场景。
来源:Research科学研究
