机器人有了迪士尼魔法!AI教机器人像卡通人物一样流畅地跳舞!
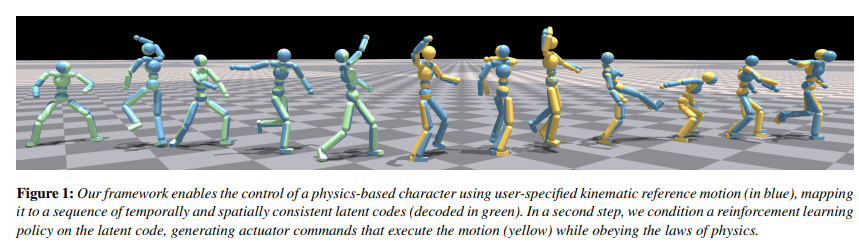
发布时间:2024-09-13在计算机动画和机器人控制领域,如何让虚拟角色或实体机器人按照预设轨迹精确执行动作,一直是一个充满挑战的难题。近日,来自苏黎世联邦理工学院和迪士尼研究院的研究团队提出了一种名为"多功能动作先验"(Versatile Motion Priors, VMP)的新方法,为这一难题提供了一个巧妙的解决方案。该方法不仅能让虚拟角色在物理仿真环境中准确追踪复杂的动作序列,还成功将其应用到了真实的双足机器人上,实现了富有表现力的动态动作。这一突破性成果为动画制作和机器人控制带来了新的可能性。
动作控制的新范式
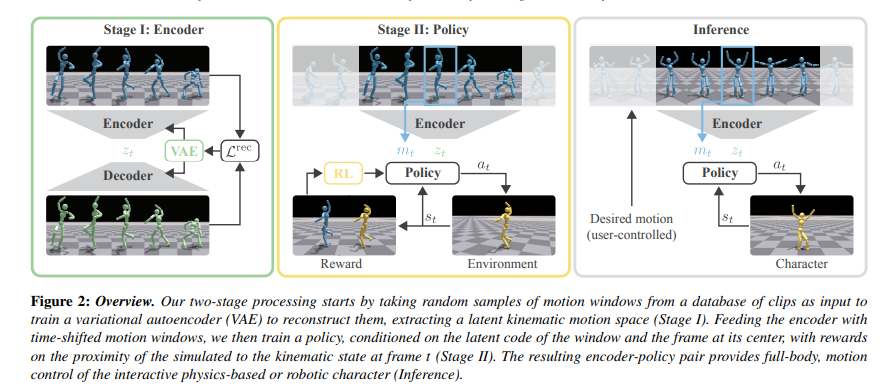
VMP方法的核心在于其独特的两阶段处理流程。在第一阶段,研究人员利用变分自编码器(VAE)从大规模、未经过滤的动作数据集中提取出一个潜在的运动空间。具体来说,他们将动作序列切分成短时间窗口,每个窗口包含当前帧及其前后几帧的运动状态信息。VAE学习将这些高维的运动窗口压缩成低维的潜在编码,同时保留动作的关键特征。
在第二阶段,研究人员训练了一个基于强化学习的控制策略。该策略以当前帧的运动状态和对应时间窗口的潜在编码作为输入,输出角色或机器人的驱动指令。通过最大化动作追踪精度和平滑度的奖励函数,控制策略学会了如何将潜在空间中的运动特征转化为符合物理规律的实际动作.
这种两阶段的方法设计巧妙地结合了无监督学习和强化学习的优势。VAE提取的潜在空间为控制策略提供了丰富的先验知识,使其能够更好地理解和生成复杂的动作序列。同时,将潜在空间学习和控制策略训练分开,避免了端到端训练中常见的模式崩溃问题,保证了学习到的策略能够覆盖数据集中的各种动作类型。
技术细节与创新
VMP方法的一个关键创新点在于其对动作数据的编码方式。与之前的工作不同,VMP没有为整个动作片段编码一个单一的潜在向量,而是为每一帧都生成一个对应的潜在编码。这种细粒度的编码方式使得控制策略能够更灵活地适应动作的变化,实现精确的全身控制。
在VAE的训练过程中,研究人员采用了一些巧妙的技巧来提高编码的质量和泛化能力。首先,他们将所有运动数据归一化到角色根节点的朝向坐标系中,使得编码对全局朝向不敏感。其次,他们使用β-VAE的变体来平衡重构误差和KL散度,以获得更有结构的潜在空间。在损失函数的设计上,他们对角色的根节点高度、朝向、速度、关节角度、关节角速度以及手脚位置等不同类型的特征分别计算重构误差,确保各种运动特征都能被准确捕获。
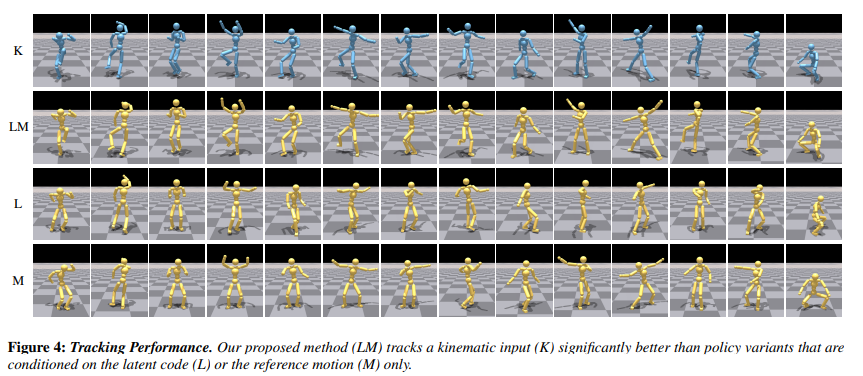
在控制策略的训练阶段,研究人员设计了一个综合的奖励函数,包括动作追踪、存活和平滑度三个部分。动作追踪奖励确保模拟角色能够紧密跟随目标动作,存活奖励通过限制角色端点(如手脚)与目标位置的最大偏差来避免极端不稳定的状态;平滑度奖励则抑制高频抖动,使生成的动作更加自然。为了提高学习效率,他们采用了随机初始化的方式来采样训练片段,避免策略陷入特定的动作序列中。
突破性成果及应用前景
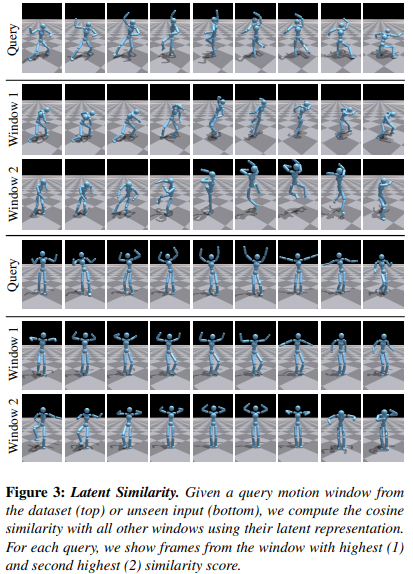
VMP方法的一个显著优势是其强大的泛化能力。通过在大规模、多样化的动作数据集上训练,该方法能够处理未见过的复杂动作序列,甚至能够对物理上不可行的动作输入做出合理的反应。这种泛化能力使得VMP成为一个真正通用的动作控制器,可以应用于广泛的动画和机器人控制场景。
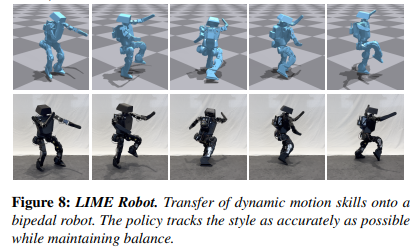
研究团队在虚拟角色和真实机器人上的实验结果令人印象深刻。在虚拟环境中,VMP控制的角色能够准确地追踪各种复杂的动作序列,包括跑步、跳跃、翻滚等高动态动作。更令人兴奋的是,研究人员成功将这一方法应用到了真实的双足机器人上。在硬件物理限制的边缘,机器人展示了令人惊叹的动态动作表现,这为未来更加灵活、富有表现力的机器人控制开辟了新的可能性。
VMP方法的另一个重要特点是其对用户输入的灵活支持。动画师或机器人操作员可以直接提供运动学参考动作作为输入,系统会自动将其映射到潜在空间,然后由控制策略生成符合物理规律的实际动作。这种直观的接口使得VMP可以无缝集成到现有的动画工作流程中,为创作者提供更大的创作自由度。
总的来说,VMP方法代表了物理角色动作控制领域的一个重要突破。它不仅在技术上创新地结合了深度学习和强化学习的优势,而且在实际应用中展示了令人瞩目的效果。这项研究为计算机动画、虚拟现实和机器人技术的发展提供了新的思路和工具,有望在游戏、影视制作、虚拟现实交互以及高级机器人控制等领域产生深远的影响。
随着VMP技术的进一步发展和优化,我们可以期待看到更多令人惊叹的应用。例如,在电影特效制作中,VMP可能会大大简化复杂动作场景的创作过程;在虚拟现实游戏中,它可能会带来更加逼真和沉浸式的角色互动体验;在机器人领域,它或许能够帮助研发出更加灵活、自然的人形机器人。VMP的出现无疑为相关领域的研究者和从业者们带来了新的灵感和可能性,我们拭目以待它在未来将会催生出怎样的创新应用。
全文链接:https://la.disneyresearch.com/wp-content/uploads/VMP_paper.pdf
原文链接:https://mp.weixin.qq.com/s/Iy7JhklqLpiRVC-kv_pU_w
来源:机器人大讲堂
