重磅!上海交大实现扑翼机器人多模态运动无缝集成,可水平起飞、悬停、爬行、自翻正
发布时间:2024-07-23上海交通大学的实验室里,有只“大飞虫”在表演空中套圈:
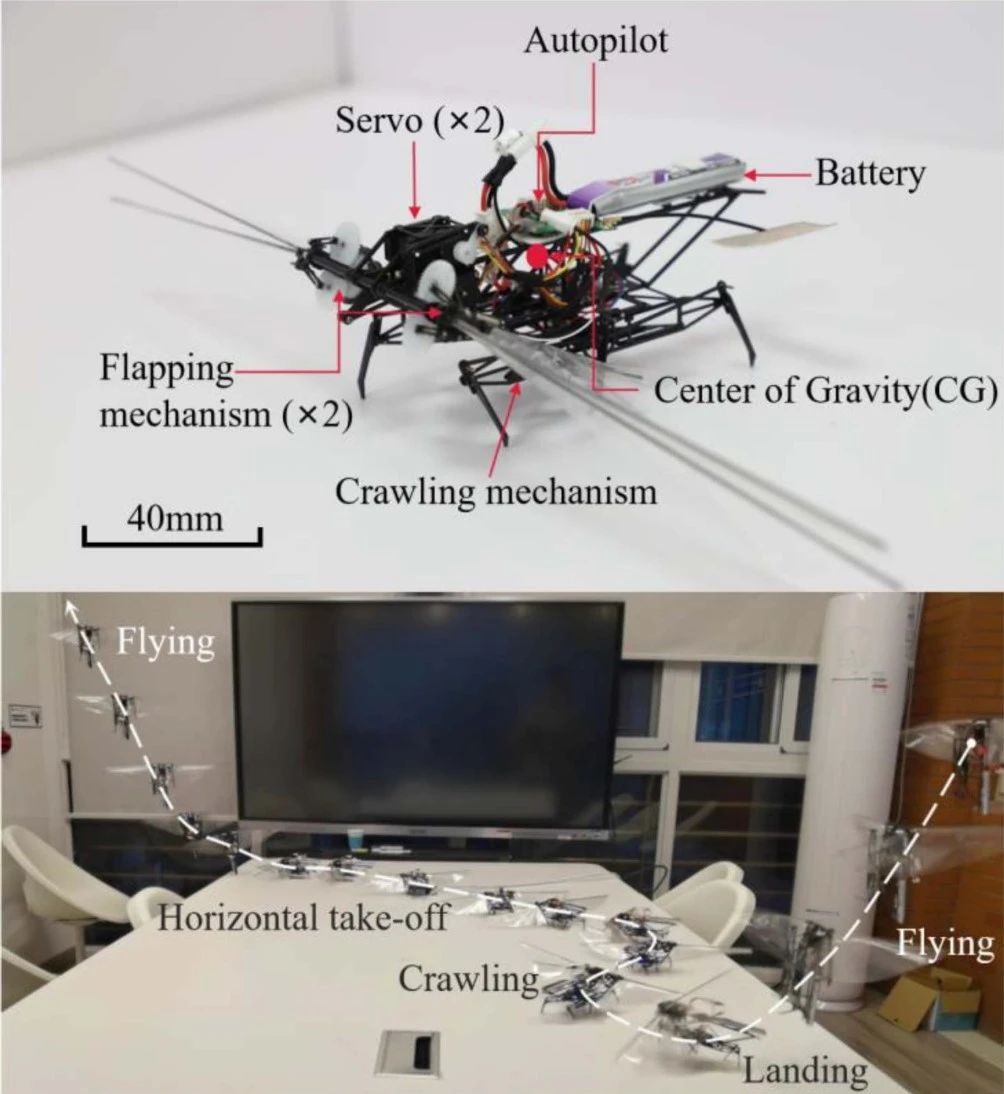
这是上海交大的最新研究——多模态无尾扑翼机器人,它开创性地实现了扑翼机器人的多模态运动, 将飞行、 爬行、 自翻正和水平起飞能力无缝集成,被IEEE Spectrum评为“迄今为止最像昆虫的机器人”。

扇扇翅膀,轻松实现水平起飞:
灵活地在地面爬行:

飞行—爬行—飞行无缝衔接地多模式运动:
哎呀,不小心摔倒了,翻个跟头自己起来:
昆虫启发的机械革命
在自然界中,许多能飞的动物同样擅长在地面上行走或爬行。例如,鸟类和昆虫不仅利用飞行进行长距离迁徙或跨越障碍,还会使用腿部进行短距离移动或爬入狭小缝隙中觅食或躲避敌人。

这种飞行与地面运动相结合的能力激发了科学家的灵感,推动了多模态机器人研究的发展。这类机器人可以在地震救援、环境监测和自然探索等多个领域大展身手,它们可以飞入人类难以到达的区域,悄无声息地执行任务,随后再返回基地。
多模态机器人的模式转换是一项具有挑战性的任务,上海交通大学团队不仅实现了扑翼机器人飞行、爬行、自翻正等多种运动能力,还将这些运动模式无缝集成:机器人能够在0.8秒内完成从爬行到飞行的快速切换, 还能在0.5秒内完成翻倒后自动扶正。
这个机器人名为JT-fly,采用无尾翼扑翼设计,大部分我们熟悉的无人机不是采用多旋翼就是固定翼设计;相比之下,会扑腾着“翅膀”起飞的扑翼机器人更安全,且在更小的尺寸上具有更高的气动效率。
无尾翼设计考虑到使用尾翼进行的姿态控制,其控制扭矩来源于气流与控制面之间的相互作用, 通常需要更大的尾翼和控制面来实现被动稳定和姿态控制。这使得它们容易受到气流扰动-湍流的影响, 导致悬停能力差。
该研究的技术创新在于:
1)集成仿生飞行和爬行能力,增强机器人在复杂环境中的灵活性和适应性;
2)快速模式切换能力,允许机器人在不同地形上最适合的运动模式之间无缝转换;
3)自扶正能力,确保在不利条件下的运行稳定性;
4)机载电池的实施,通过有效的模式转换延长操作持续时间。
扑翼与爬行的巧妙结合
JT-fly重量为35.4克,翼展为33厘米。扑翼机构有四个机翼(即两对)、两个电机和两个伺服系统。电机调节左右对机翼的扑动频率,伺服器调节行程平面产生控制转矩,控制机身姿态,实现对横滚、俯仰和偏航轴的控制。
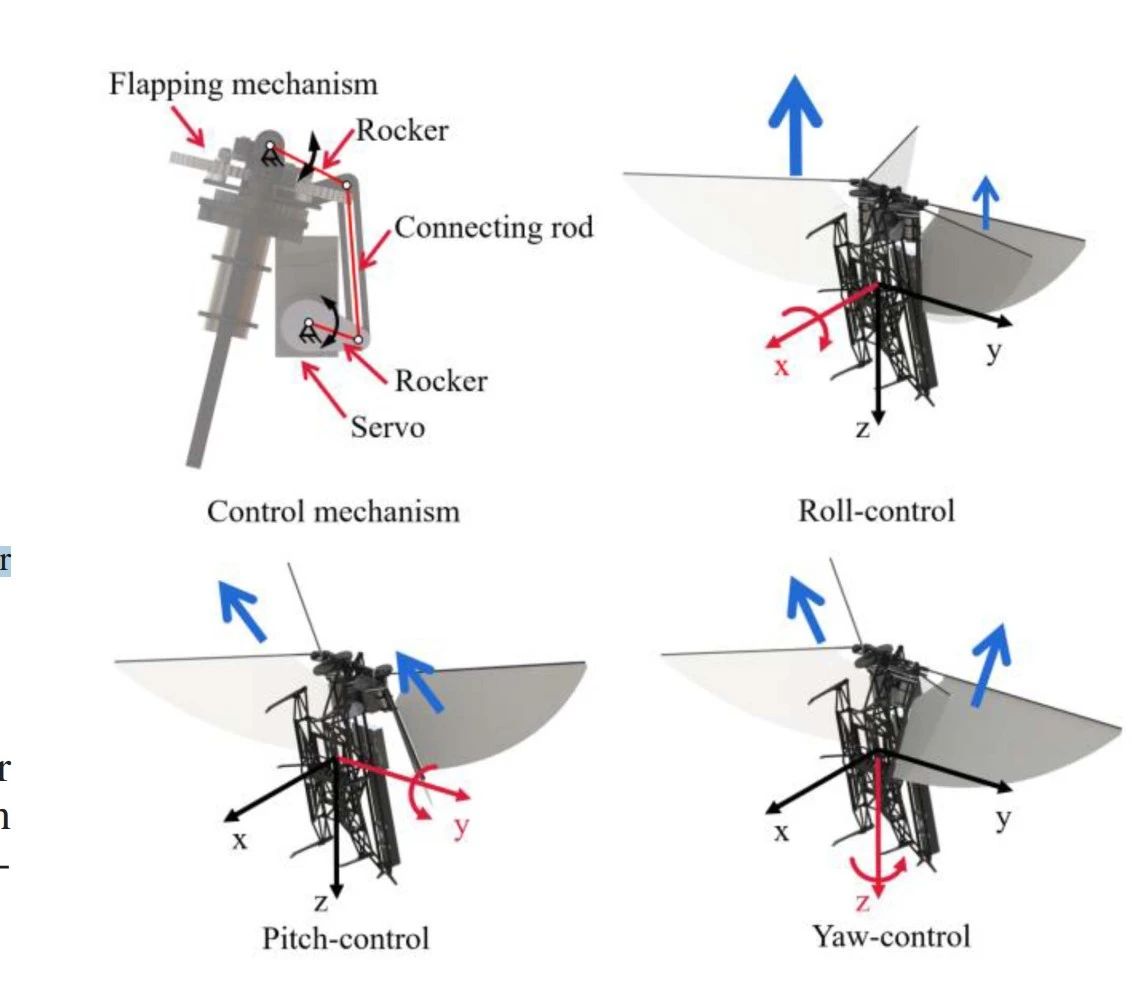
在飞行模式下,多模态机器人利用两套扑翼机构和两个伺服机构产生飞行升力和控制机身姿态,可在空中悬停, 实现6自由度自由飞行。由于无尾扑翼机器人的不稳定性, 研究团队使用主动反馈控制系统来提供飞行稳定性。

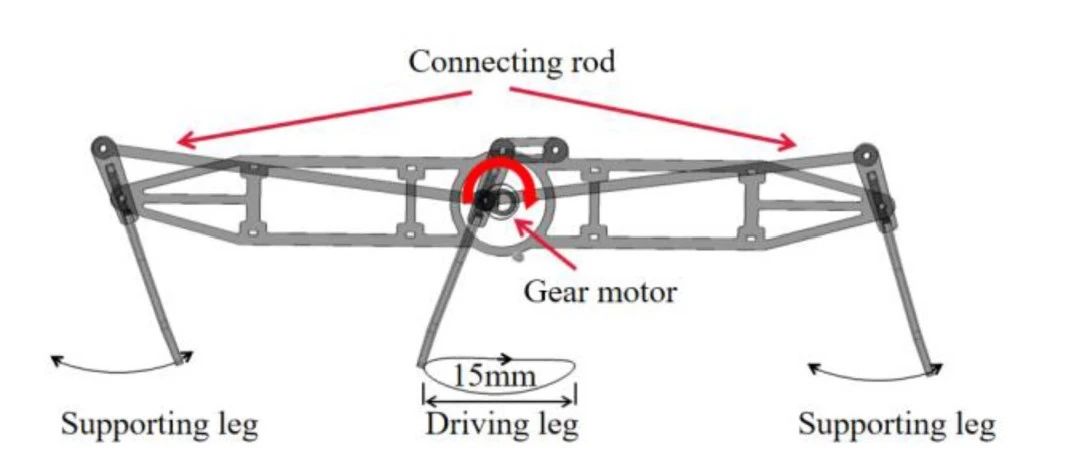
爬行模式使用了独立的爬行机构,总重量为5.4 g,由两台电机驱动、两级行星齿轮减速,每个电机驱动机器人一侧的三条腿,包括前腿、中腿、后腿。
其中,中腿的抬腿动作产生向前推力,前腿和后腿利用连杆带动进行往复摆动,起到辅助作用。转向通过两侧电机的速度差来实现,当右侧爬行机构的电机速度快于左侧时,机器人向左转弯;相反则向右转弯。当左右电机的旋转方向相反时,机器人可以原地转圈。
对于飞行与爬行的转换,在研究团队最初的设计中,简单地将无尾扑翼机器人与六足爬行机器人结合在一起,只能实现垂直起飞,爬行模式的稳定性也不够好,在粗糙的路面上快速移动时容易翻车。
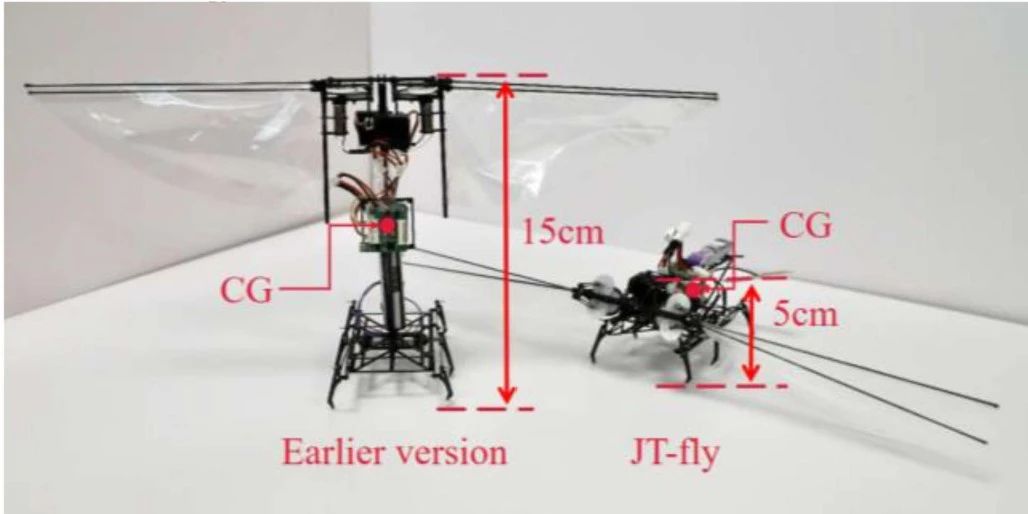
为此,研究团队进行了设计升级,采用水平起飞来实现飞行和爬行转换,这使机器人在地面运动过程中重心更低,爬行稳定性更高。当机器人处于水平爬行状态时,伺服器控制行程平面向上倾斜,翅膀快速拍打产生头向上的俯仰力矩,使机器人快速上升起飞。
着陆时,机器人的翅膀会停止拍动,底部碳纤维制成的尾巴首先接触地面,然后身体向前回正触地,完成从飞行模式到爬行模式的转换。
水平起飞也赋予了机器人自扶正的能力。当机器人栽跟头时,伺服系统驱动行程平面倾斜, 使升力指向上方,翅膀的拍打为机器人提供俯仰力矩。机器人离开地面后,可以继续拍动进入悬停状态,也可以停止拍动,然后着陆完成自扶正。
总结与展望:续航问题有待突破
上海交通大学团队的这项研究发表在《IEEE Robotics and Automation Letters》期刊上,标题为“A Multi-Modal Tailless Flapping-Wing Robot Capable of Flying, Crawling, Self-Righting and Horizontal Take-Off(一种可飞行、爬行、自扶正和水平起飞的多模态无尾扑翼机器人)”
研究人员对机器人进行了功耗、飞行耐力与机动性测试:在爬行模式下,机器人的平均功耗为0.93 W;飞行模式的平均功耗为7.46 W,是爬行功耗的8倍。机器人可以使用内置电池连续飞行8.2分钟或连续爬行60分钟以上,由于无尾扑翼机器人的结构复杂性,需要主动反馈控制系统来提供飞行稳定性,因此很少有无尾扑翼机器人能展示出长续航时间自由飞行的能力,该技术目前仍有待突破。
凭借快速切换多种运动模式的能力,多模式无尾扑翼机器人能灵活适应不同的环境需求,这一特点使其在灾害救援、环境监测和城市调查等领域具有广泛的应用前景,比如地震、 泥石流等自然灾害发生后,机器人可以依靠其飞行能力快速部署到任务区,通过悬停找到合适的栖息地点、在各个方向灵活飞行、爬进废墟和丛林的狭窄空间执行任务。未来,随着电池能量密度的提高和控制系统的优化,这类机器人将能够在更复杂的环境中执行更长时间的任务,为人类社会带来更多便利和安全保障。
来源:机器人大讲堂
