能屈能伸可变形!美国新型轮式机器人跳跃、登高、爬坡、负重样样都行!
发布时间:2023-10-11轮式机器人走着走着突然被压扁了,还能继续前进吗?
来自科罗拉多州立大学的最新成果,给出了非常肯定的答案。不仅不怕被压扁,还能通过膨胀和收缩轮子主动改变形状:
不仅可以改变形状,跳跃、登高、爬坡、负重样样都行!


还能克服多种障碍,在沙地、草地、岩石、冰雪等各种自然地形上快到飞起!
从高处坠落也完全不用担心,“啪“的一下爬起来继续行走:
这么厉害的技能,它到底是怎么做到的?
▍能屈能伸的轮子——张拉整体结构
注意看,这个机器人的轮子和传统轮式机器人的轮子不太一样。
传统轮式机器人多使用圆形、或履带式车轮,运动模式相对比较单一;想要实现跳跃、爬楼梯等多模式运动,还需要融入更复杂的设计,例如使用连杆、折纸、或离心驱动机构等。
与之不同的是,这个机器人的车轮使用了张拉整体结构:张拉整体结构其实是一种建筑结构,由刚性杆和弹性缆组成,每根刚性杆离散布置,刚性杆端部由弹性缆连接,形成自应力平衡的稳定空间结构;具有可折叠、轻量化、易于制造和高承载重量比等独特特点。
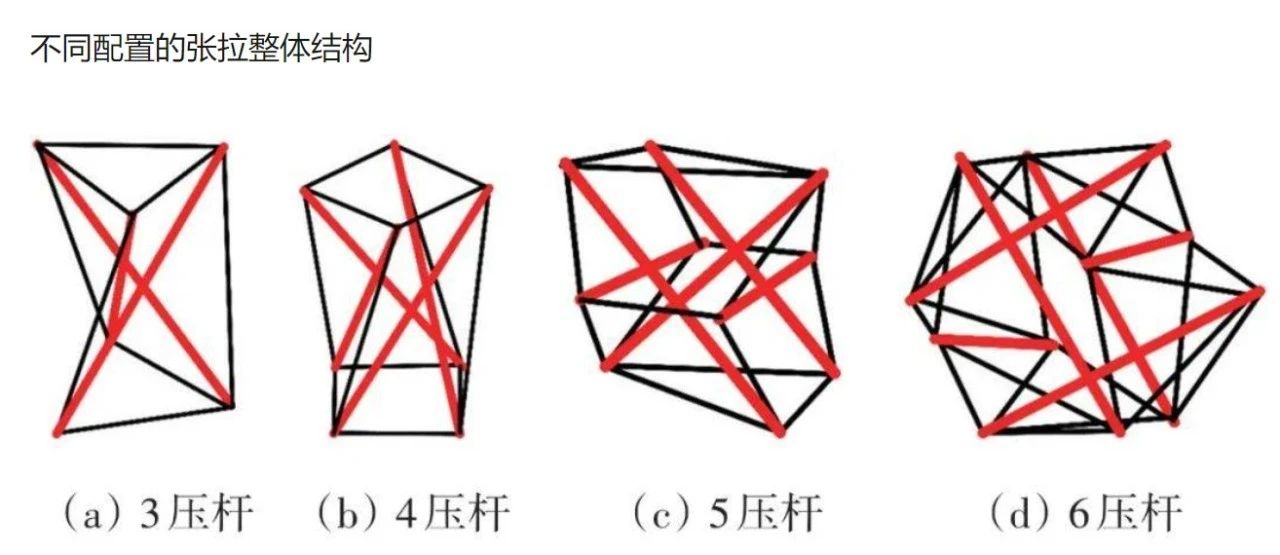
研究人员将张拉整体结构引入到机器人的设计中,作为机器人的轮子,它由6根刚性杆和24根弹性索组成,并附加了两个轮毂:
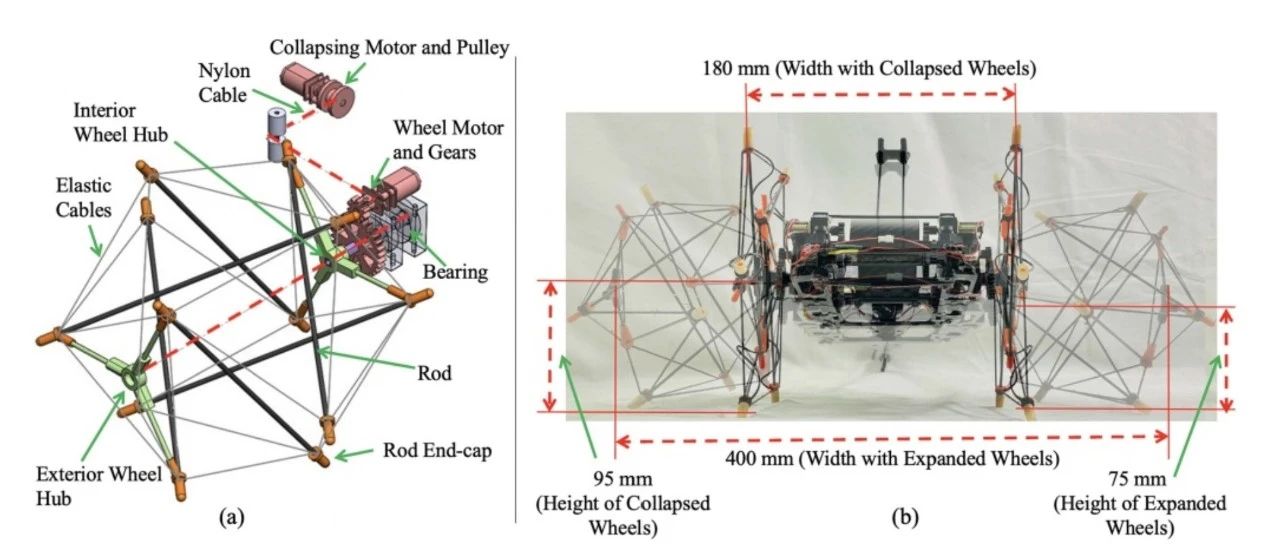
还在每根杆的末端增加了端盖, 以产生足够的摩擦力, 以便在地面上行驶。
这种张拉结构可以根据需要展开和折叠,宽度可以从400mm减小到180mm,同时高度从75mm增加到95mm,不仅不怕被压扁,通过缝隙时也不会被卡住啦!

与传统车轮相比,它也更轻、更柔韧、还具有减震功能,所以从高处坠落也毫发无伤。
▍跳跃机制的秘密
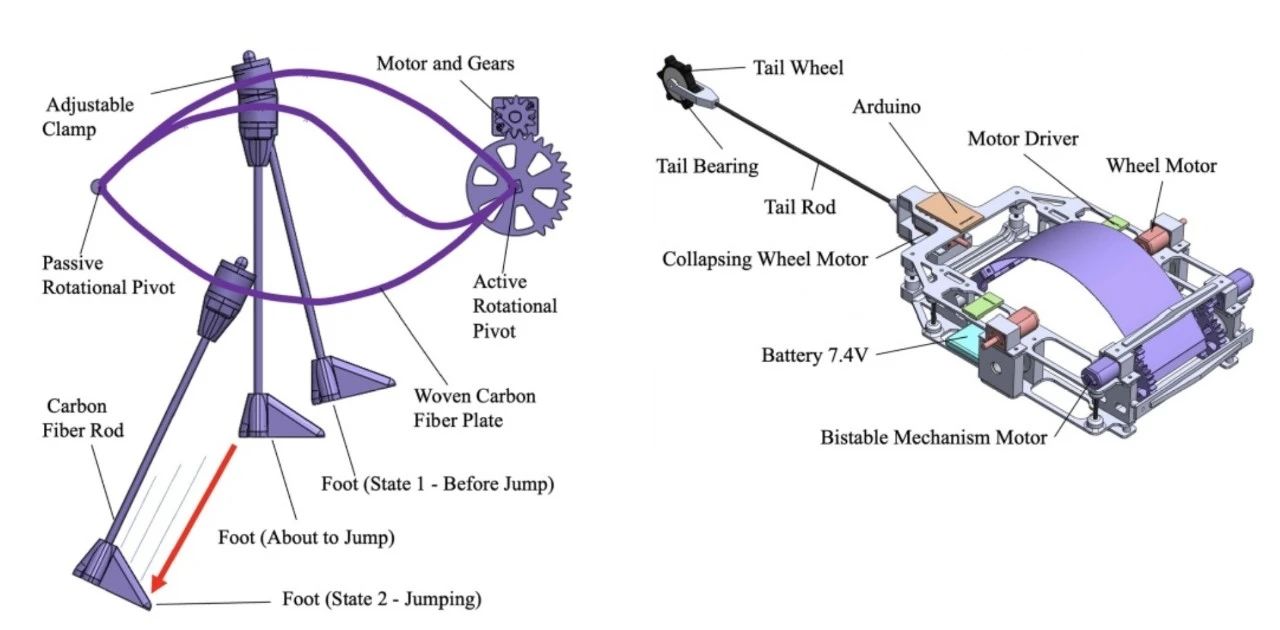
机器人整体由两个轮子、身体和一个小尾巴组成,身体内部容纳了双稳态机构、电子元件和电机。两个用于驱动轮子的电机位于机器人的两侧,用于折叠轮子的电机位于后部,用于激活双稳态机构的两个电机位于前部。电子元件分布在机架周围。
除了张拉整体的轮子外,机器人身体部分还有一个很妙的设计,也是它实现跳跃运动的关键——双稳态结构。
双稳态结构就是具有两种稳定状态的结构,通过快速切换,可以释放双稳态结构中存储的能量,实现机构的快速响应与力放大;而它之所以被选中,是因为它需要的组件较少,相比于弹簧驱动更简单、使用寿命也更长。
机器人的双稳态结构在身体中间,包含一个柔性板,其两端分别连接到一个被动和一个主动旋转电机。
当电机旋转时,柔性板弯曲以储存弹性能量。到达临界点,柔性板迅速弹出,释放储存的能量,这时,安装在柔性板上的“脚“会迅速推向地面进行跳跃。
机器人还有一个由2毫米直径的碳纤维杆制成的尾巴,尾巴的末端有一个直径为20毫米的小被动轮,轮子上有六个刺。

尾巴有两个功能:首先,它可以支撑机器人的重量,助力爬坡及越障。
其次,它可以在跳跃时起到辅助作用,确保机器人在跳跃的顶点时不会倒下翻转。
▍障碍赛道大冲关,未来将实现自主运动
研究人员对机器人进行了运动能力测试——障碍赛道大冲关:先是跨过碎石路,然后跳跃墙壁、跨越障碍圆管、穿越缝隙、走上台阶,最后是爬坡。

(机器人一次性冲向终点)
除此之外,还进行了基本的有效载荷实验,他们向机器人添加装满液体的瓶子,直到它背不动为止,测试表明,机器人可以携带1.2kg的有效载荷, 这是它本身重量的4.9倍!
除了室内闯关测试, 研究人员还进一步测试了机器人在各种室外真实环境中的性能,如穿越各种岩石:砾石(平均粒径2毫米)、 光滑的河岩、 尖锐的岩石、 粗沙和细沙,以及植被(如灌木和高草)。


研究人员还在冬季条件下测试了机器人,包括平坦的冰、带岩石的冰和雪,这些都没问题,但是车轮有个死敌—带木棍的森林地面,木棍会卡在张结构的车轮上,这也是未来需要改进的一点。

这类机器人可广泛应用于灾后搜救或非结构化环境中的监视和监测。不过目前它还停留在手动控制,未来研究人员计划进一步增加额外的传感器, 如摄像头、 GPS或惯性测量单元,
以执行定位和感知,使半自动或全自动操作成为可能。
▍研究者简介
这项研究发表在《IEEE/ASME Transactions on Mechatronics》中,题为:“A Shape-Changing Wheeling and Jumping Robot Using Tensegrity Wheels and Bistable Mechanism“(使用张拉整体轮和双稳态机构的变形轮跳机器人)。
全文链接:https://ieeexplore.ieee.org/abstract/document/10144110
主要研究人员如下:Sydney Charles Spiegel,于2022年获得USA CO柯林斯堡科罗拉多州立大学机械工程理学士学位。他目前是科罗拉多州立大学自适应机器人实验室的研究员。他的研究兴趣包括变形张拉整体车轮、多模态游泳、 飞行、 轮式机器人、 软机器人、 可重构机器人和双稳致动器。

Jiefeng Sun, IEEE学生会员, 2014年毕业于中国兰州理工大学机械工程专业理学士, 2017年毕业于中国大连理工大学机械工程专业硕士学位, 2022年毕业于科罗拉多州立大学机械工程专业博士学位。他目前是USA康涅狄格州纽黑文耶鲁大学的博士后。他目前的研究方向是研究兴趣包括人造肌肉、 软体机器人、 可重构机器人等。

Jianguo Zhao, IEEE院士, 2005年获得哈尔滨工业大学机械工程学士学位, 2007年获得深圳哈尔滨工业大学深圳研究生院机电工程硕士学位, 2015年获得USA密歇根州东兰辛州立大学电气工程博士学位。他目前是CO柯林斯堡科罗拉多州立大学的副教授 自适应机器人实验室主任。他的研究兴趣包括软体机器人飞行机器人和可重构机器人。

来源:机器人大讲堂
