耶鲁大学两栖机器龟登Nature封面,入水瞬间四肢变脚蹼,能“按需进化”!
发布时间:2022-10-24
具体怎么个按需进化呢?像美人鱼一样,这只机器龟在陆地上的腿跳下水可以瞬间变成脚蹼!

它来自耶鲁大学,开发人员的灵感来源于最古老的爬行动物龟,它们既可以在陆上生活,又可以在水中生活。这个机器人兼具陆龟与海龟的能力,在地面上,它的四肢可以像陆龟一样正常行走,下水后其腿就会变成鳍状肢,顺滑的游行~


耶鲁大学的研究人员通过一种“自适应形态发生”(adaptive morphogenesis)策略开发出这款机器人,融合了传统的刚性部件和软性材料,还为其取了一个特别贴切的名字,英文叫 ART(Amphibious Robotic Turtle),中文为“两栖机器龟”。
从腿到脚蹼的转化
以往多数机器人的开发策略都在单一操作环境的基础上构建其结构和行为,这使机器人只能在单一环境中表现出色,但却影响了它们适应其他环境的能力。即便是两栖机器人,也往往会添加多个推进机制,在每个环境中使用不同的推进机制,从而导致能源效率低下。
机器龟的不同在于,它在每个环境中利用相同的推进机制,可以根据环境调整其形状、刚度和行为。当从一种环境过渡到另一种环境时,四只脚能够自动的调整形状、刚度和动作,这也就是研发人员所说的“自适应形态发生”。
和龟的形状一样,机器龟的整个身体包括四个子系统:底盘、外壳、肩关节和变形肢体。底盘容纳电子元件,外壳可以保护身体并进行浮力调整。

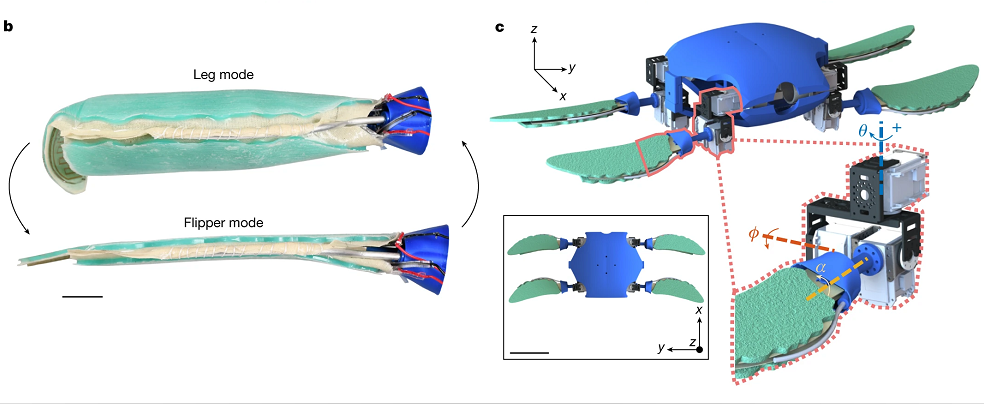
肩部关节在运动学配置中各有三个马达,可以实现一系列的步态,比如爬行、匍匐滑行、游泳:
在陆地上行走
匍匐前行
在水中游泳
可变形的四肢是最重要的部分,由可变刚度材料和气动驱动器组成,这种可变刚度材料可以通过加热软化,并给气动推杆充气,使肢体的横截面积和硬度发生变化。
开始加热,从鳍状变成腿状模式
停止加热,保持压力直到肢体冷却;然后释放压力,进入腿状模式
这些变化使机器龟的肢体能够在有利于行走的圆柱形几何形状,和有利于游泳的平鳍几何形状之间来回切换,进行适应性变形。在真正下水测试时,机器龟通过行走和匍匐前进的方式靠近水面,到达水域后,机器龟就将腿变成鳍状肢,使其能够以基于升力和阻力的水上步态进行畅游。


从陆地过渡到水中
未来可用于检测海洋生态系统
海龟有脚蹼,擅长游泳;陆龟有圆腿,可在走路时承重。耶鲁大学团队的机器龟结合了两者的特点,为研发能够适应多样化环境的下一代自主系统提供了新思路,即通过动态调整形态,在不同环境中实现最佳的行动性能。
科学家们表示,这个机器人潜在的应用有很多,比如沿海岸线的生态系统监测、潜水员支持和海洋养殖,在学研的领域,机器人还可以帮助研究人员研究复杂冲浪区以及其他环境过渡区的运动物理学。
论文:https://doi.org/10.1038/s41586-022-05188-w
来源:机器人大讲堂
