研究人员首次实现利用脑机接口控制多指运动
发布时间:2022-07-28现代脑机接口可以使瘫痪患者恢复功能,但目前的上肢脑机接口无法再现对个体手指运动的控制。密歇根大学的研究人员首次在非人类灵长类动物中展示了一种实时、高速的脑机接口,它利用皮层内神经信号来弥合这一差距。
密歇根大学的研究人员表示,他们实现了利用安装在可植入设备上的计算机解释灵长类动物精确、高速、多指运动的大脑信号。他们实现了这一关键步骤,使那些失去肢体功能的人能够更自然、实时地控制假肢,甚至是他们自己的手。
生物医学工程副教授 CindyChestek说:“这是第一次有人能够同时精确控制多个手指。我们利用实时机器学习,它可以将食指与中指、无名指或小指分开驱动假肢。”
从美国国防部高级研究计划局(DARPA)这样的政府机构到埃隆·马斯克(Elon Musk)的Neuralink这样的私人企业,各类机构组织都在开发能够对各种高科技设备提供实时控制的脑机接口。然而,这一领域的一个主要障碍是大脑对多个手指的连续控制。
到目前为止,连续的单个手指控制只能通过读取肌肉活动来实现,这在肌肉瘫痪的情况下是无法使用的。目前利用大脑信号的技术已经允许灵长类动物或人类实验对象通过简单的动作操纵假肢——就像指针或钳子一样。
相比之下,Chestek实验室开发的系统使灵长类动物能够在电脑屏幕上为数字“手”做出复杂的动作。该技术有可能使因脊髓损伤、中风、肌萎缩性脊髓侧索硬化症(ALS)或其他神经系统疾病而导致瘫痪的各种用户受益。
研究人员表示,“我们不仅展示了第一次人脑控制单个手指的动作,而且还使用了非常适合可植入设备的计算高效记录和机器学习方法,我们希望未来,瘫痪患者可以利用这项技术,通过可植入的脑机接口再次控制自己的双手。”

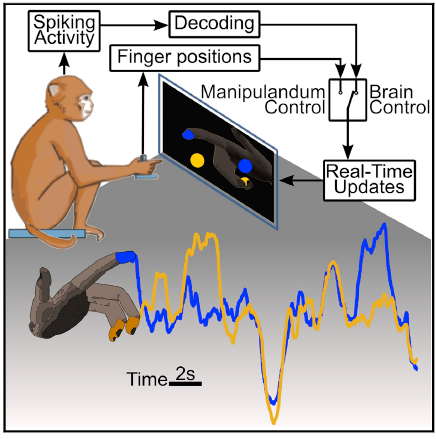
图 1. 实验说明
如上图(A) 猴子坐在一个显示虚拟手的屏幕前,左手放在操纵杆上。用手(A右侧)同步测量食指和MRS指组的位置及神经活动。根据实验的阶段,位置测量或解码的手指位置用于驱动虚拟手。目标基于(B)中的姿势以中心向外模式伪随机呈现,或以目标位置沿每个手指的维度伪随机放置的模式呈现,但间隔不超过范围的 50%。
图(B)可视化手部运动。与休息相比,显示的姿势为 +30%,在完全弯曲和完全伸展之间为 50%。 I,食指组; M,MRS指组; F、弯曲; E、延伸; R,休息。
该系统通过植入一个4毫米x 4毫米的电极阵列,从从初级运动皮层(控制运动的大脑中枢)收集信号。该阵列在大脑皮层中提供了100个小接触点,潜在地创造了100个信息通道,使研究小组能够在神经元层面捕捉信号。Chestek说,类似的植入物已经在人类身上使用了几十年,而且不会感到疼痛。
这项工作的关键是定义一项训练任务,该任务将系统地分离手指的运动,迫使它们独立运动,除非有其他指示。如果这些动作本身不被隔离,那么与这些动作相对应的大脑活动就无法被隔离。

研究小组通过在屏幕上向两只健全的恒河猴展示一只带有两个目标的动画手来实现这一目标,一个用于食指,另一个用于中指、无名指和小指作为一组。目标被着色以指示哪个手指应该指向每个目标,允许猴子使用测量手指位置的系统自由控制动画手。他们击中目标以获得苹果汁作为奖励。
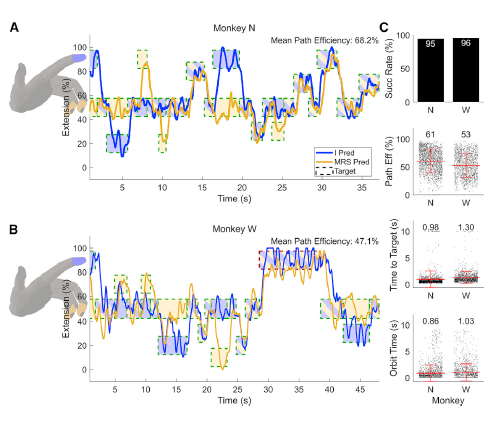
使用尖峰带功率 (SBP) 的双指闭环卡尔曼滤波器解码
当猴子移动手指时,植入的传感器捕捉到来自大脑的信号,并将数据传输到计算机,计算机使用机器学习来预测手指的运动。经过大约5分钟的机器学习算法训练后,这些预测就被用来直接控制猴子大脑活动的动画手,绕过它们物理手指的任何动作。
通过直接访问运动皮层,研究人员提出的技术可以捕获、解释和传递信号的速度接近实时。在某些情况下,猴子在现实世界中需要 0.5 秒才能完成的手部动作可以在0.7 秒内通过界面重复完成。
研究人员说到,“在对新硬件进行大量商业投资的同时,展示这些脑机接口的新功能真的很令人兴奋,我认为这一切的发展速度将比人们想象的快得多。”
参考文献
Samuel R. Nason et al, Real-time linear prediction of simultaneous and independent movements of two finger groups using an intracortical brain-machine interface, Neuron (2021).
DOI: 10.1016/j.neuron.2021.08.009
https://medicalxpress.com/news/2021-09-individual-finger-advanced-prostheses-primates.html
来源:脑机接口社区
