MIT「迷你猎豹」秒速3.9米,刷新四足机器人世界记录
发布时间:2022-03-22自2014年立项以来,MIT的机器猎豹项目在四足机器人界屡有突破和贡献。
刚刚,迷你猎豹(Mini Cheetah)又晒出了新成绩:创下了秒速3.9米的四足机器人行进速度世界记录。
MIT机器猎豹,四足机器人里跑得最快
当下,各种机器人公司和项目,为了刷存在感,同时也给投资人信心,最时兴让机器人玩杂耍。
比如,2019年中,既有波士顿动力的两足机器人耍后空翻,也有MIT的四足机器猎豹耍后空翻,堪称业界热点、一时瑜亮。
当然,后空翻的意义不止于好看,还在于展示控制系统与行进机制的稳健性,以及体现处理输入数据的速度。
然而,机器人项目绕不过的难题是——它除了「稳」,还要「快」!
现在,市面上的各路机器狗产品价格堪比上档次的汽车,速度却远远跟不上。
当下机器狗的老头慢遛速度,让各种搞钱广告的杂技展示都减色不少。比如以下这种足球运动,有哪种真实动物会慢成这样呢……

不过2022年3月份,MIT的四足机器猎豹,终于比不管是东方还是西方的竞品都跑得还快了。
按照研究团队的数据,现在MIT的四足机器猎豹室内运动速度上限是秒速3.9米。
室外运动上限是秒速3.4米。

室内原地旋转的角速度是每秒5.7弧度。
考虑到没练过的普通人类整体旋转的角速度也就是每秒6-9弧度(花样滑冰运动员能转出每秒40弧度以上),机器猎豹打转的敏捷度已经很值得称道了。
换算一下,MIT的机器猎豹现在室内速度接近9迈,室外速度接近8迈。
直观地说,虽然与汽车相比,这速度还不算挂一档。但如果这数字调在跑步机上的话,即使健身狂魔们也得出汗费力才能跟上了。
此前的MIT机器猎豹,只算得上是四脚爬爬,现在才能真算上「跑步前进」了。尽管比不得活猎豹,但「迷你猎豹」(Mini Cheetah)跑赢真人肥宅似乎不算难事。
而且考虑到机器猎豹在冰上能维持同等运动速度与灵活度,真人恐怕还做不到咧。

步态不潇洒?
如图所示,迷你猎豹的步态还有点笨拙,没有猎豹的矫健身姿,看起来倒像一只小狗在地板上抓来抓去。
这是因为,AI除了加速之外没有优化任何东西。
「强化学习能找到跑得快的解决方案,但由于其奖励功能不明确,它没有理由选择一种「看起来更自然」或「人类更喜欢的」步态。」研究者称。

当高速移动时,它可能不是最优雅的姿态。
诚如研究者所言,「这个模型当然可以被指导开发一种更流畅的运动形式,但此次大家努力的重点只是优化速度」。
业界趋势:合成数据训练机器狗
教四足机器人运动,此前无外乎是两种途径:
摄像头等传感器搜集现实数据,然后码农手动编程处理数据;
或码农将传感器搜集的现实数据作为数据训练集,训练AI控制四足机器人动作。
「投多少人工出多少智能」,这两种办法其实都是耗时费力。
码农手动编程的时间成本与资源耗费不消说,环境出个变化就得手工改程序。
拿现实世界数据使劲训练AI,现在也遇到瓶颈了。
现实世界的数据变量实在太丰富,各种雄心勃勃要搞全无人L4自动驾驶的大车厂们就因此在训练AI上吃了大瘪:
砾石地、沙地、雪地的路况不同,不同风速、湿度、颗粒物状态的空气能见度不同,路上各种从活人到井盖的物体运动状况不同。越要训练出能因应万象的AI司机,现实数据的搜集和处理成本就越大。
当然如果和马斯克一样跳脱,在车上装超级电脑来走数据跑AI。理论上也不是不可以,只是现实中人会说这种解决方案是神经病。
穷则思变,如果现实数据搞起来太累太麻烦,那么换合成数据,不是就跑通了么?
现在业界巨擘们纷纷搞模拟环境/合成数据。谷歌拿NeRF为Waymo的无人车训练渲染了个模拟旧金山出来。英伟达在猛砸资源做Omniverse Replicator。

斩牛刀可以用来杀鸡,合成数据连参数和变量大到吓人的无人车AI都可以用,两足/四足机器人要面临的环境变量少得多,自然也可以用。
2021年起,加州大学伯克利分校的研究团队就在用模拟环境训练两足机器人Cassie。据称Meta的AI团队也在用模拟环境训练四足机器人。
MIT团队训练机器猎豹:3小时合成逾百日数据量
四足机器人界的泰山北斗之一、MIT的机器猎豹项目,自不甘人后。
研究团队完全不用摄像头等传感器输入真实外界数据,完全在模拟环境中训练控制机器猎豹的AI。
不得不说,效果满好。
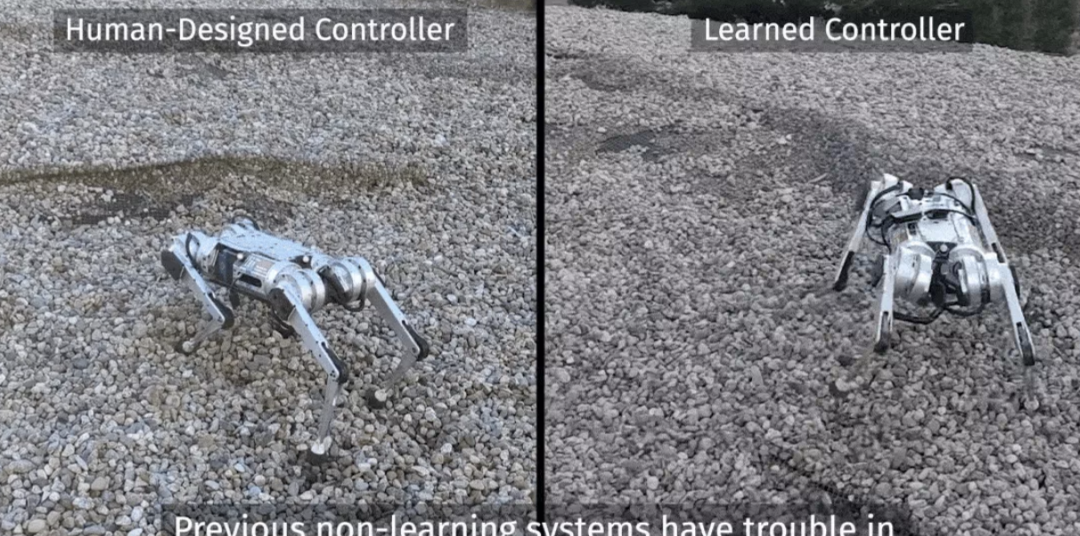
由MIT研究团队释出的实景对比图像可以看出:
人工预编程的控制软件,让机器猎豹的步态更好看,但砾石地上的复杂路况大大限制了行动速度与敏捷度。
而在模拟环境中、通过奖惩机制训练的强化学习AI模型,控制下的机器猎豹酷似野狗乱爬,但速度和敏捷度提升了不止一个档次。
MIT研究小组表示,他们的环境模拟器在3小时内生成了相当于过百天的各种地形、天气等环境变化数据,以此为训练集来用强化学习方法训练机器猎豹的控制AI。
如此训练出的步态控制模型,的确很可能无法判别机器猎豹足下的是冰地还是砾石地。但AI判断出形态不稳、步态受干扰、要倒的结果速度可是大大提升了。
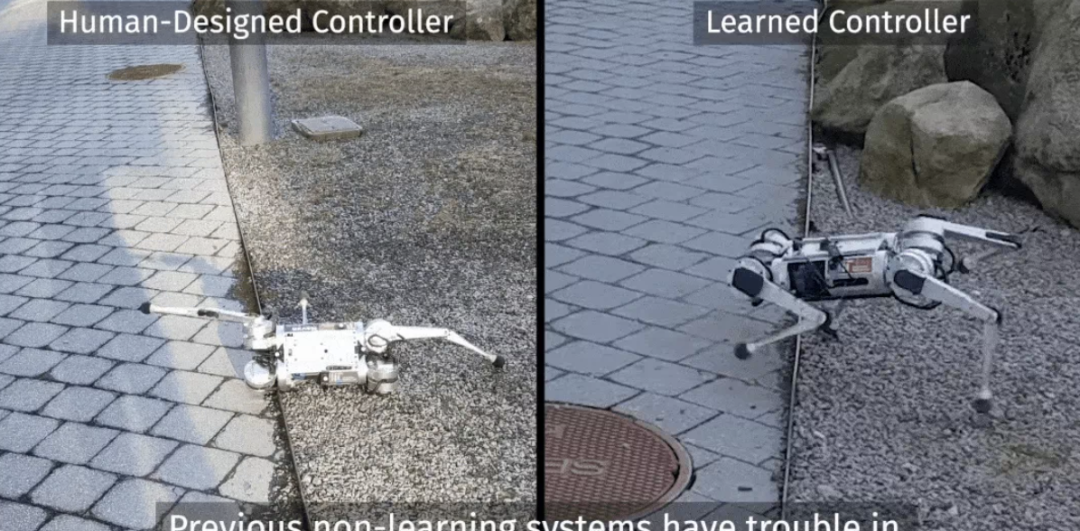
因此机器猎豹步态与形体的因应方案虽然难看,但既能高速前冲、又不会同时仆街,这个成就在四足机器人界可是前所未有。
如下图所示,用合成数据训练的强化学习AI,让机器猎豹成功过坎,避免了此前的仆街状况。
落地前景
MIT计算机科学和人工智能实验室(CSAIL)的研究人员相信,他们的技术可以用于提高其它机器人系统能力,尤其适用工厂发货前的组装系统。
全球疫情加速了机器人在工业中的应用,根据《自动化世界》(Automation World)的一项调查,在组装和制造工厂中,已经有44.9%工厂将机器人视为不可或缺的一部分。
现在,MIT开发设计的「迷你猎豹」系统,可以通过模拟环境进行强化学习,加快了运行时间。这种管线操作模式能用来训练机器猎豹,就能用来训练流水线机器人。

而且合成数据+强化学习这种模式还有个好处,就是摆脱了传感器的关注局限、让AI更加高效流畅地得出结果。
机器猎豹在快跑冲刺时,所有机件都出于满负荷运载状态,这时AI不会管是因为地面太滑要倒、还是螺丝松了要倒,给出的姿态解决方案只要达到“不会倒”的结果就好。
同样的模式应用在流水线机器人上,那可真是为生产效率提了个大台阶。
参考资料:
https://gizmodo.com/mits-robotic-cheetah-taught-itself-how-to-run-sets-new-1848656968
https://futurism.com/the-byte/mits-robot-cheetah-run
https://sites.google.com/view/model-free-speed/
来源:机器人大讲堂
