《超能陆战队》成真?香港中文大学(深圳)自由重构机器人再升级
发布时间:2022-03-17
电影《超能陆战队》向我们展示了一款由成千上万微磁单元组成的微型机器人:每个带有磁性的微型单元通过磁力即可互相连接,并转变成各种各样的三维空间结构。在两年前的机器人领域顶会IROS2020中,香港中文大学(深圳)林天麟教授团队展示了一款名为FreeBOT的模块化自重构机器人。FreeBOT的灵感便是来源于电影《超能陆战队》,每个带有磁性的球体都是独立的个体,它们通过磁力即可自由连接,简单智能体的组合可以实现超出个体的集群行为能力。该成果获得了当年的IROS机器人机构设计最佳论文,是IROS创办以来唯一获此殊荣的境内高校(相关报道:港中深「新型自重构机器人」获IROS最佳机器人设计提名)
近日,林天麟教授团队的模块化自重构机器人再次升级,相关成果 “FreeSN:A Freeform Strut-node Structured Modular Self-reconfigurable Robot – Design andImplementation” 将发表于机器人领域的另一顶级学术会议—— IEEE机器人与自动化国际会议(IEEE InternationalConference on Robotics and Automation, ICRA)
背景
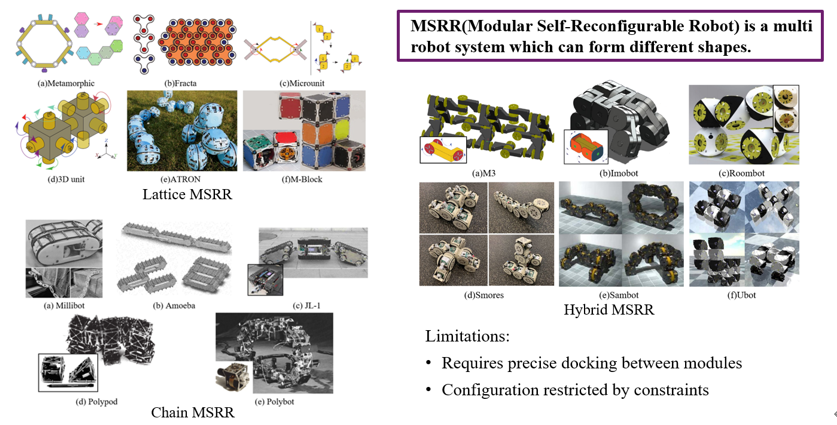
现有的大多数模块化自重构机器人存在连接点数量有限且离散的问题,导致了模块化自重构机器人苛刻的自组装条件以及有限系统构型,而非结构化环境对模块化自重构机器人系统的快速重构和构型多样性提出了更高的要求。为此,林天麟教授团队提出了“无约束连续连接”的设计概念,可实现机器人模块间在任意位置的自由连接。
新型模块化自重构机器人设计FreeSN
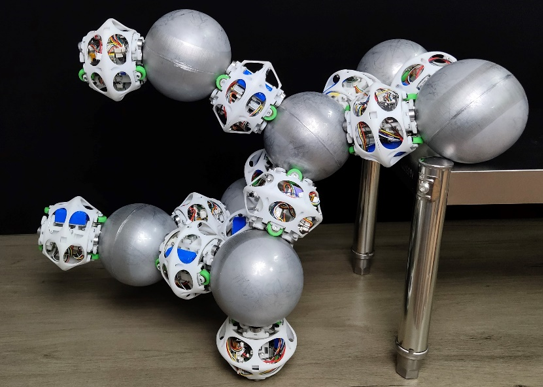
论文提出了一款新型的模块化自重构机器人FreeSN。该机器人模块基于无约束连续连接机构,能够实现更加鲁棒与快速地自重构,以更好地适应不同的非结构化环境。同时,该机器人系统能够组成类似桁架以及并联机器人的拓扑结构,保证了模块化机器人系统的结构稳定性与可扩展性。
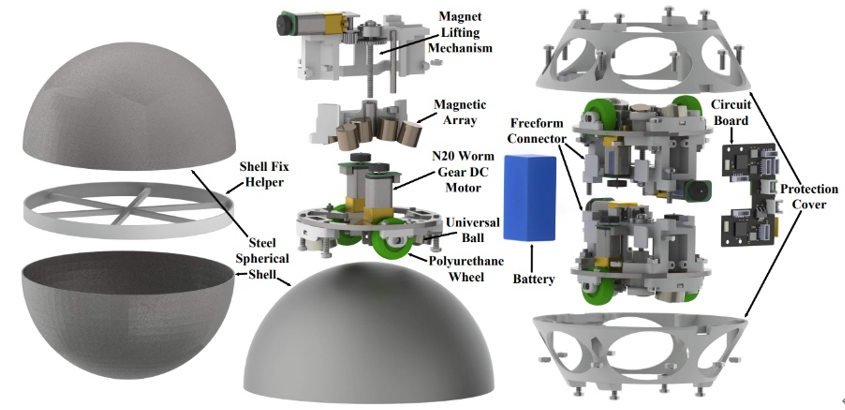
该模块化自重构机器人系统包含两种机器人模块:“节点”模块和“连杆”模块。“连杆”模块包含两个磁性连接器以及驱动电路。磁性连接器包含永磁铁列阵,能够对“节点”模块表面的铁球壳产生强大的吸引力,因而能够连接在“节点”模块表面任意位置,并通过轮式驱动单元实现自由移动。同时,磁铁抬升机构能够改变磁性连接强度,以实现断开连接以及自重构能力。
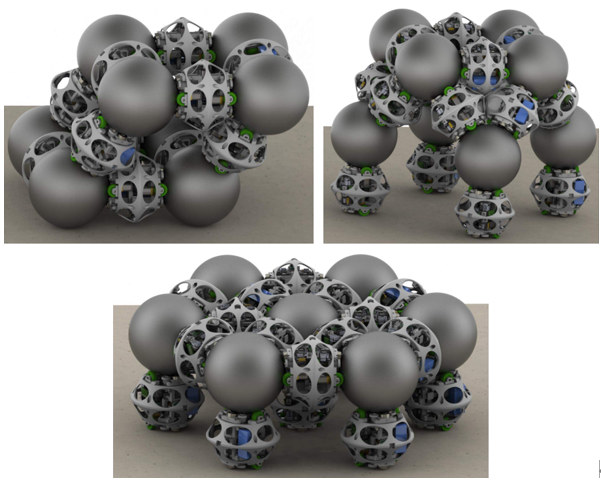
受益于无约束连续连接的磁性连接器,该模块化自重构机器人系统能够组成三角形以及并联机器人的结构。三角结构使得机器人系统能够组成类似桁架的结构,相比于传统多面体形状的模块化自重构机器人,具有更好的结构稳定性。并联机器人结构能够叠加单个模块的驱动能力,从而提高了机器人系统的可扩展性。同时,轮式驱动器以及磁铁抬升机构可以对外部环境产生作用力,能够给该模块化机器人系统带来更加丰富的功能。
机器人模块具备自主机动能力,分散的机器人模块可以自主组装成一个整体系统

面对单个机器人模块无法穿越的障碍物环境,多个机器人模块能够彼此合作,通过构型变换实现障碍物的跨越。
组合在一起的模块能变身成大力士,搬动重量远超自身的重物

还能变成物流小能手,通过多组模块间的协作将货物从一个地方送到另一个地方。

潜力巨大,未来可期
研究人员相信,电影《超能陆战队》中具有自由重构特性的“微磁机器人”是模块化自重构机器人的终极目标,而FreeSN是林天麟教授团队为了实现这个目标而交出的又一份答卷。
未来,他们将在机器人系统构型感知、并行控制、分布式环境感知以及自重构运动规划算法上进行更深入的研究,实现模块化机器人集群自主跨越不确定及非结构化场景的功能。期望不久的将来,能够实现电影中“微磁机器人”的震撼场景,实现真正的自由重构机器人。
YouTube视频:https://www.youtube.com/watch?v=c4jPrvwJ8so
B站视频:https://www.bilibili.com/video/BV1Aq4y147XS
实验室链接:https://freeformrobotics.org/
来源:机器人大讲堂
